製品構成と機能概要
製品構成
本製品は以下の構成で使用します。
MicroPeckerX LIN Analyzer Plus

MicroPeckerX本体 1台

USBケーブル 1本
MicroPeckerX Control Software(GUIアプリケーション)
※ サニー技研Webサイトからダウンロード
同期ケーブル 1本
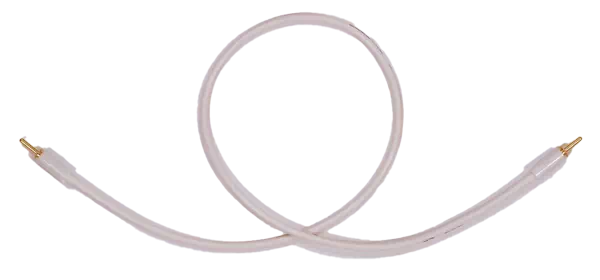
LINケーブル
用途に応じて、以下のLINケーブルを組み合わせて使用します。
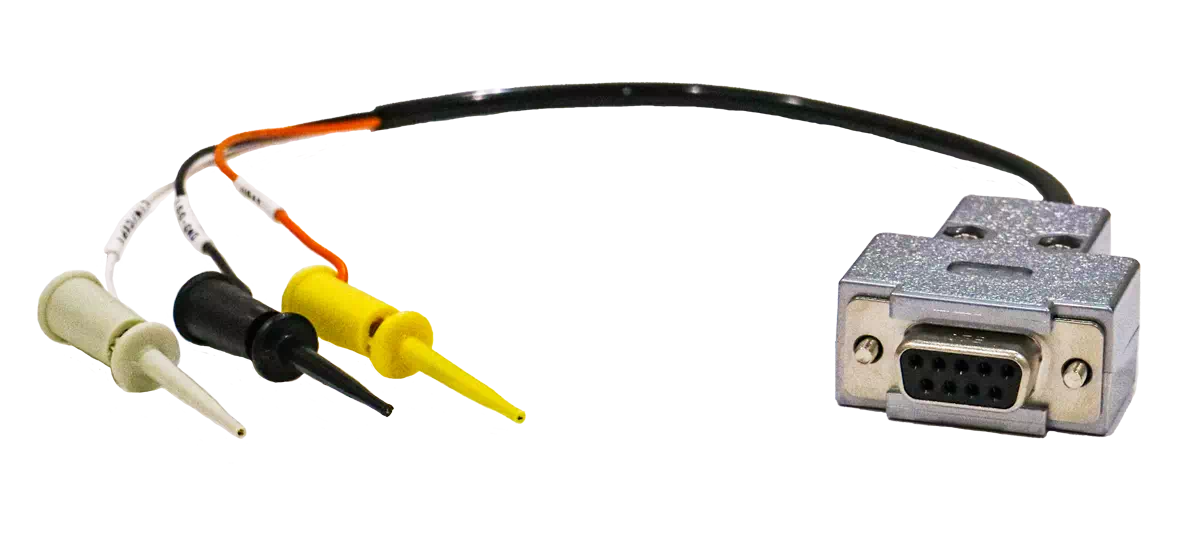
LIN クリップケーブル
《S810-MX-CB3》
《S810-MX-CB3》
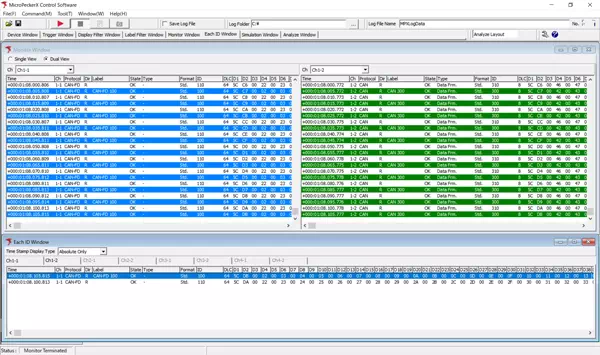
製品の機能概要
本製品は、以下の機能を提供します。
MicroPeckerX LIN Analyzer Plus
| 機能 | 概要 |
|---|---|
| モニタリング機能 | 接続したLINバスのフ�レームデータをリアルタイムモニタリングします。 ・トリガ検出によるログ開始/停止制御 ・出力フレームのフィルタ ・任意フレームへのラベル付与・強調表示 ・同一ID固定モニタ表示 |
| シミュレーション機能 | 各種の送信モードを選択可能です。 1. マスターシミュレーション ・スケジュール送信 ・割り込み送信 2. スレーブシミュレーション 3. ログ再生モード |
| アナライズ機能 | ログデータの読み込み~解析をサポートします。 ・自動/手動ログ読み込み ・データ検索 ・フィルタ表示 ・Chログマージ |
システム構成図
システム構成例
システム構成例を以下に示します。
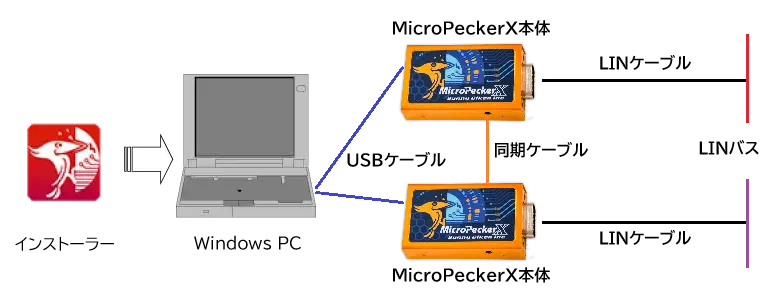
| 機器名 | 備考 |
|---|---|
| WindowsPC | LINモニタの条件設定、LINモニタデータを表示するGUIアプリケーションの実行時に使用します。 |
| インストーラ | ソフトウェア(GUIアプリケーション、USBドライバ)のインストールおよびバージョンアップ時に必要となります。 |
| MicroPeckerX本体 | PCとはUSBケーブルで、LINバスとはLINケーブルで��それぞれ接続してください。 複数のMicroPeckerX本体を使用する場合は、同期ケーブルでMicroPeckerX本体同士を接続してください。 |
| LINケーブル | MicroPeckerX本体をLINバスに接続するためのケーブルです。 |
| USBケーブル | MicroPeckerX本体をPCに接続するためのケーブルです。コネクタはA-microBタイプで、USB2.0に対応しています。 |
| 同期ケーブル | 複数のMicroPeckerX本体を同期させるためのケーブルです。 |
動作環境
設定ソフトウェアを使用するPCの動作環境は以下の通りです。
| 項目 | 内容 |
|---|---|
| OS | Windows 11 (64bit), Windows 10 (64bit), Windows 8.1 (64bit) [*1] [*2] |
| CPU | Intel社製またはAMD社製のx86プロセッサ(Core i5/Ryzen5以上推奨) |
| ハードディスク | 10Gbyte 以上の空き容量 [*3] |
| メモリ | 8Gbyte 以上を推奨 |
| USBポート | USB2.0(Hi-Speed)対応で、ポート数が接続するMicroPeckerX数分必要 [*4] |
| ディスプレイ | 1920×1080以上を推奨 |
| その他 | モニタ、キーボード、マウス |
[*1]: 省電力機能を持つPCの場合、本製品使用中にPCのスリープ、ハードディスクの停止、CPU クロックの低下が発生しないように設定してください。
[*2]: 仮想環境での動作は未サポートです。
[*3]: 長時間のモニタリングをする場合、十分なハードディスクの空き容量を確保してください。
[*4]: 外付けのUSBハブを用いて接続する場合は、必ずセルフパワー対応機器を選定いただき、外部より電源を供給した上で接続ください。
(USBハブをバスパワー駆動で接続した場合、動作しない、または不安定になることがあります)
用語説明
本書で使用する用語の説明を以下に記述します。
| 用語 | 説明 |
|---|---|
| LIN | Local Interconnect Networkの略称。 車載ネットワークのコストダウンを図ることを目的に開発された通信プロトコル。ISO 17987で規定された国際標準規格。 |
| DIO | Digital Input/Output(デジタル入出力)の略称。 ON(1)とOFF(0)の二値で外部の状況を判断するために必要となる電気信号。 |
| A/D | Analog/Digitalの略称。 アナログ信号をデジタル信号に変換することを意味する。本製品では電圧値をデジタル信号に変換して取得する機能を有している。 |
| MicroPeckerX | LINとDIO/ADを1chずつ搭載したハードウェアシステム。本アプリケーションで使用。 |
| Ch | Channel(チャンネル)の略称。LINバス等の物理的または論理的な通信路を指す。 MicroPeckerX では複数の Ch(例:Ch1-1, Ch2-1)を使い、それぞれ独立してデータの送受信を行うことができる。 |
| モニタリング | LINバス等から取得したデータをGUIアプリケーション上にリア�ルタイム表示。 |
| ロギング | LINバス等から取得したデータをテキストファイル(.csv)形式でPCの指定フォルダに自動保存。 |
| 物理値 | 実値として使用されるデータ値。「シグナル値 × 分解能 + オフセット」または「(シグナル値 + オフセット) × 分解能」で算出。 |
| シグナル値 | LINフレームのレスポンス内に格納される未変換の生データ値。 |
| ログ再生 | 取得したログファイルを用いて、その内容を再現・再生する機能。 |