製品構成と機能概要
製品構成
本製品は以下の構成で使用します。

MicroPeckerX本体 1台

CAN 2ch Dsubケーブル 1本

USBケーブル 1本
同期ケーブル 1本
※ MicroPeckerX InstaGWでは使用しません
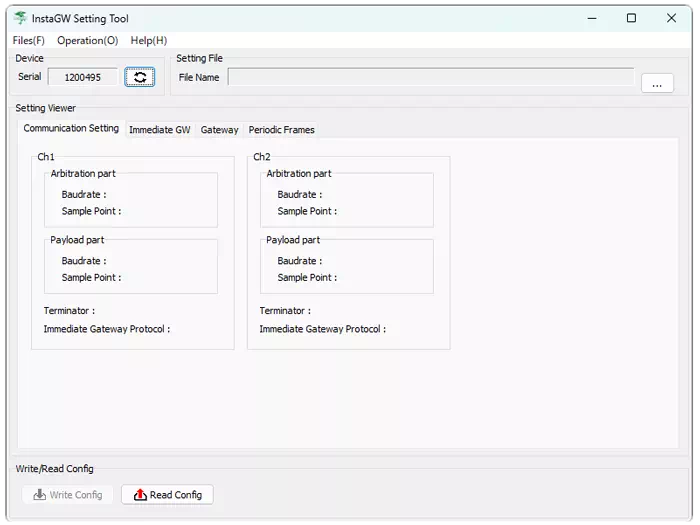
InstaGW Setting Tool
(GUIアプリケーション)
※ サニー技研Webサイトからダウンロード

GW設定ファイル(Excel形式)
製品の機能概要
本製品は、以下の機能を提供します。
MicroPeckerX InstaGW(MicroPeckerX本体)
| 番号 | 機能 | 概要 |
|---|---|---|
| 1 | CAN/CAN FD通信(2Ch)機能 | CANおよびCAN FDの2Ch通信を行うことができます。 |
| 2 | スタンドアロン動作 | モバイルバッテリー等の電源を利用し、PCレスで動作させることができます。 |
| 3 | 即時GW動作 | 指定のCh、ID、DLのフレームを受信した際に、もう片方のChに指定したプロトコル(Ch毎に固定)にて同一IDフレームを即時送信します。 |
| 4 | 通常GW動作 | 指定のCh、プロトコル、ID、DLのフレームを受信した際に、もう片方のChに指定したプロトコル、DLの同一IDフレームを送信します。また送信するタイミングを任意でずらすことが可能です。 |
| 5 | 周期送信機能 | 指定したCh、プロトコル、ID、DL、データの周期送信を行います。データ上にはアライブカウンタ、チェックサムをいれることができます。 |
| 6 | IDフィルタリング | 指定したChのIDフレームのみを片方のChへ流すことが可能です。 |
設定ソフトウェア(MicroPeckerX InstaGWを利用する為のPC用ソフトウェア)
| 番号 | 機能 | 概要 |
|---|---|---|
| 1 | GW設定ファイル読込み機能 | MicroPeckerXにてGWや周期送信を行う為の設定情報が記載されたExcel形式のファイルを読み込むことができます。 |
| 2 | GW設定書き込み機能 | GW設定ファイルから読み込んだ設定をMicroPeckerXに書き込むことができます。 |
| 3 | GW設定読み出し機能 | MicroPeckerXに書き込まれている設定情報を読み出すことができます。 |
システム構成図
システム構成図
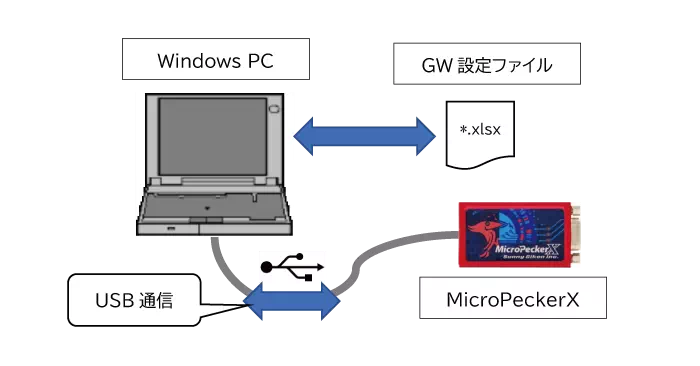
PCによるGW設定時
GWの設定時はWindows PCを使用し、GW設定ファイルの内容をMicroPeckerXに書き込みます。
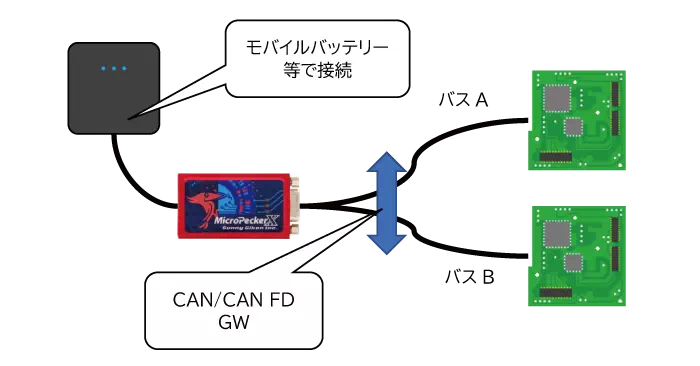
GW機能利用時
GW機能利用時は設定ファイルに基づき、各CANバス(バスA、バスBなど)間でGW通信を行います。
機器の接続
PCによるGW設定時
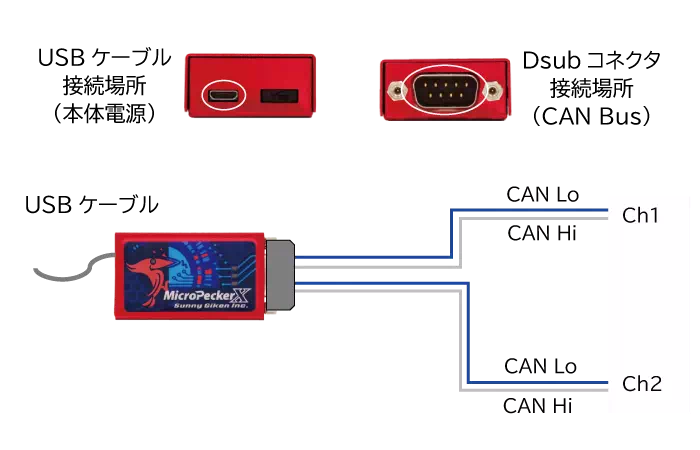
付属のUSBケーブル等を使ってMicroPeckerXをPCのUSBポートに接続してください。

※ USBポートは左側のみ使用可能です。右側のキャップは外さないでください。
GW機能利用時
付属のCAN 2ch Dsubケーブル等を使って、各ChのCANバスに接続してください。GW機能利用時、MicroPeckerXはスタンド�アロン動作を行いますが、MicroPeckerX本体へはUSBからの電源供給が必要です。
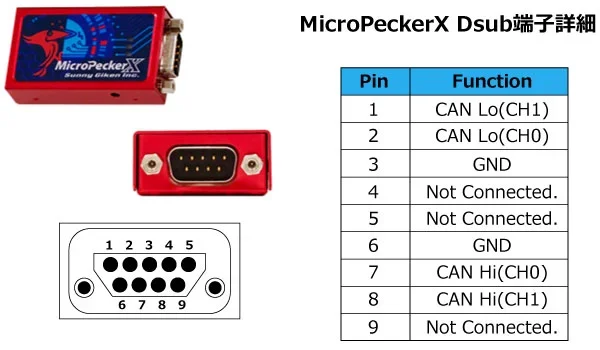
Dsub端子詳細
Dsub端子のアサインは以下の通りです。
MicroPeckerX本体
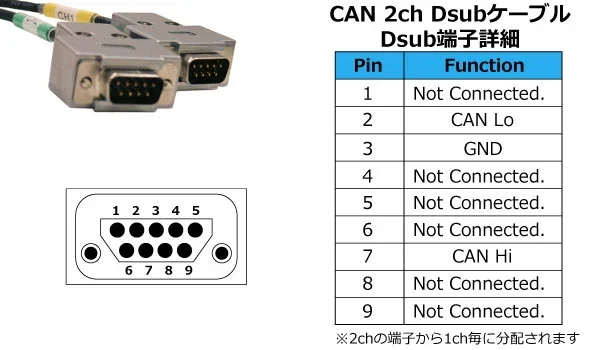
CAN 2ch Dsubケーブル(Ch1,Ch2コネクタ側)
動作環境
設定ソフトウェアを使用するPCの動作環境は以下の通りです。
| 項目 | 内容 |
|---|---|
| OS | Windows 11(64bit)、Windows 10(64bit) |
| CPU | Intel Core i3 以上 |
| ハードディスク | 100Mbyte以上の空き容量 |
| メモリ | 4Gbyte以上 |
| USBポー��ト | USB 2.0(Hi-Speed)対応 |
| ディスプレイ | 1024×768以上 |
用語説明
本書で使用する用語の説明を以下に記述します。
| 用語 | 説明 |
|---|---|
| CAN | Controller Area Networkの略称。車載ネットワーク用に開発された通信プロトコル。ISO 11898で規定された国際標準規格。 |
| CAN FD | CAN with Flexible Data-rateの略称。CANを拡張し、より高速・大容量のデータ送受信を可能にした通信プロトコル。ISO 11898-1:2015として標準規格化。 |
| MicroPeckerX | 車載通信インターフェースを搭載したハードウェアシステムの総称。データ取得や解析など、アプリケーションと合わせて使用する。 |
| Arbitration | CAN フレームの先頭にある識別子(ID)フィールド。複数ノードが同時に送信要求を出した際、ID の大小で優先度を決定し、バスの占有を制御する。 |
| Payload | CAN フレーム内のデータフィールド。実際の生データ(シグナル値)を格納する部分で、最大 8 バイト(CAN)または 64 バイト(CAN FD)まで送受信できる。 |
| Ch | Channel(チャンネル)の略称。CANバスの物理的または論理的な通信路を指す。 MicroPeckerX では複数の Ch(例:Ch1-1, Ch1-2)を使い、それぞれ独立してデータの送受信を行うことができる。 |
| GW | Gateway(ゲートウェイ��)の略称。異なる通信プロトコルを持つネットワーク間でデータを中継する機能を備えた機器またはソフトウェア。 |
| GW設定ファイル | MicroPeckerXがGW機器として動作する設定が記載されたExcel(xlsx)形式のファイル。 |