製品構成と機能概要
製品構成
本製品は以下の構成で使用します。
MicroPeckerX CAN FD Analyzer

MicroPeckerX本体 1台

USBケーブル 1本
MicroPeckerX Control Software(GUIアプリケーション)
※ サニー技研Webサイトからダウンロ�ード
同期ケーブル 1本
CANケーブル
用途に応じて、以下のCANケーブルを組み合わせて使用します。
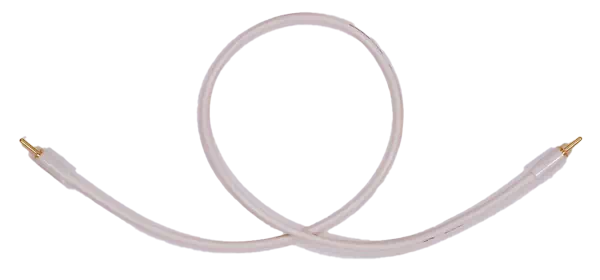
CAN 1chクリップケーブル
《S810-MX-CB1》
《S810-MX-CB1》

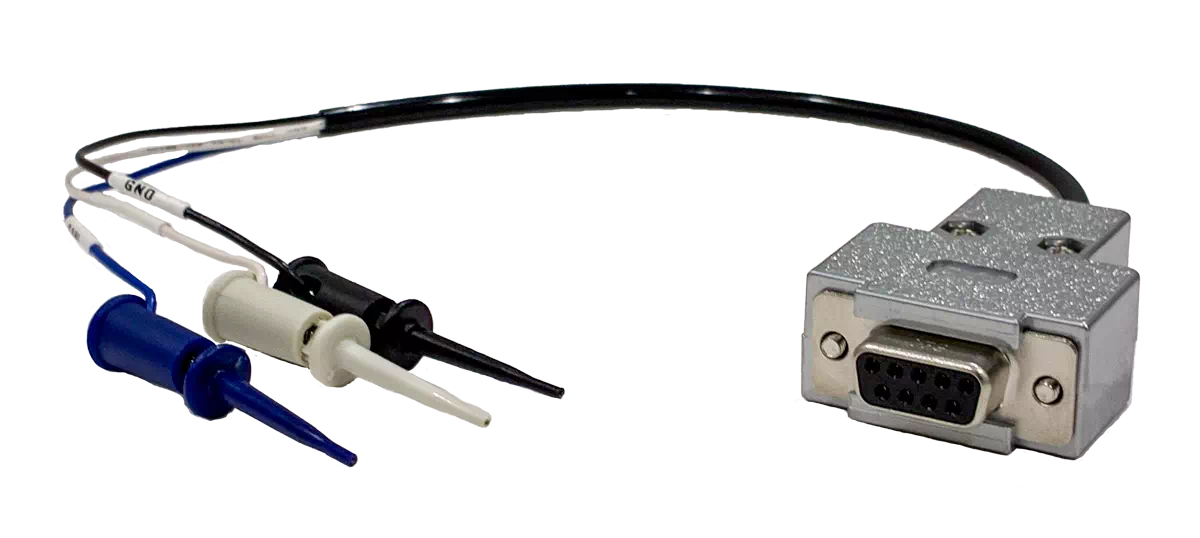
CAN 2ch Dsubケーブル
《S810-MX-CB2》
《S810-MX-CB2》
製品の機能概要
本製品は、以下の機能を提供します。
MicroPeckerX CAN FD Analyzer
| 機能 | 概要 |
|---|---|
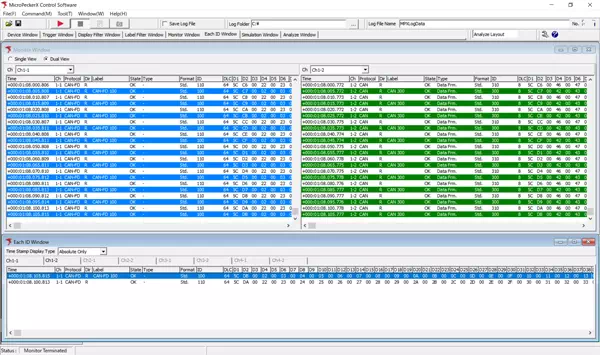
| モニタリング機能 | 接続したCANバスのフレームデータ�をリアルタイムモニタリングします。 ・トリガ検出によるログ開始/停止制御 ・出力フレームのフィルタ ・任意フレームへのラベル付与・強調表示 ・同一ID固定モニタ表示 |
| シミュレーション機能 | 各種の送信モードを選択可能です。 1. スロット送信 ・最大28フレーム登録+任意フレーム即時送信 ・周期送信/イベント送信/イベント周期送信/Direct送信 2. ログ再生モード 3. バースト転送モード |
| アナライズ機能 | ログデータの読み込み~解析をサポートします。 ・自動/手動ログ読み込み ・データ検索 ・フィルタ表示 ・Chログマージ ・フレーム周期計測 ・GWフレーム遅延時間計測 ・GWフレームロスト計測 ・GWフレーム滞留計測 |
システム構成図
システム構成例
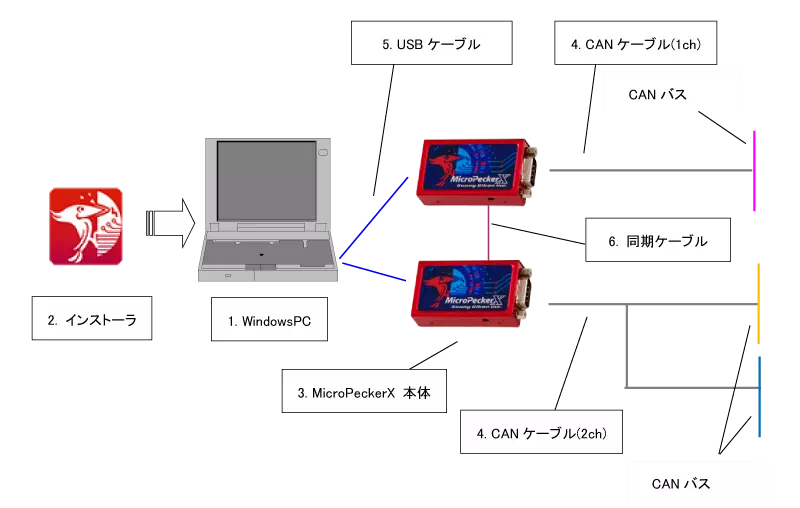
システム構成例を以下に示します。
| # | 機器名 | 備考 |
|---|---|---|
| 1 | WindowsPC | CANモニタの条件設定、CANモニタデータを表示するGUIアプリケーションを実行するWindowsPCです。 |
| 2 | インストーラ | ソフトウェア(GUIアプリケーション、USBドライバ)の初回インストール、およびバージョンアップ時に必要となります。 |
| 3 | MicroPeckerX本体 | USBケーブルをPCと接続して、CANケーブルをCANバスと接続してください。 複数のMicroPeckerXを使用する場合は、同期ケーブルでMicroPecker同士を接続してください。 |
| 4 | CANケーブル | MicroPeckerXをCANバスに接続するためのケーブルです。 1ch用のケーブル(CB1)と、2ch用のケーブル(CB2)があります。 |
| 5 | USBケーブル | USB2.0 Micro-Bのケーブルです。PCとの接続する際に、ご使用ください。 |
| 6 | 同期ケーブル | 複数のMicroPeckerXを同期させるケーブルです。 |
動作環境
設定ソフトウェアを使用するPCの動作環境は以下の通りです。
| 項目 | 内容 |
|---|---|
| OS | Windows 11 (64bit), Windows 10 (64bit), Windows 8.1 (64bit) [*1] [*2] |
| CPU | Intel社製またはAMD社製のx86プロセッサ(Core i5/Ryzen5以上推奨) |
| ハードディスク | 10Gbyte 以上の空き容量 [*3] |
| メモリ | 8Gbyte 以上を推奨 |
| USBポート | USB2.0(Hi-Speed)対応で、ポート数が接続するMicroPeckerX数分必要 [*4] |
| ディスプレイ | 1920×1080以上を推奨 |
| その他 | モニタ、キーボー�ド、マウス |
[*1]: 省電力機能を持つPCの場合、本製品使用中にPCのスリープ、ハードディスクの停止、CPU クロックの低下が発生しないように設定してください。
[*2]: 仮想環境での動作は未サポートです。
[*3]: 長時間のモニタリングをする場合、十分なハードディスクの空き容量を確保してください。
[*4]: 外付けのUSBハブを用いて接続する場合は、必ずセルフパワー対応機器を選定いただき、外部より電源を供給した上で接続ください。
(USBハブをバスパワー駆動で接続した場合、動作しない、または不安定になることがあります)
用語説明
本書で使用する用語の説明を以下に記述します。
| 用語 | 説明 |
|---|---|
| CAN | Controller Area Networkの略称。車載ネットワーク用に開発された通信プロトコル。ISO 11898で規定された国際標準規格。 |
| CAN FD | CAN with Flexible Data-rateの略称。CANを拡張し、より高速・大容量のデータ送受信を可能にした通信プロトコル。ISO 11898-1:2015として標準規格化。 |
| MicroPeckerX | 車載通信インターフェースを搭載したハードウェアシステムの総称。データ取得や解析など、アプリケーションと合わせて使用する。 |
| Arbitration | CAN フレームの先頭にある識別子(ID)フィールド。複数ノードが同時に送信要求を出した際、ID の大小で優先度��を決定し、バスの占有を制御する。 |
| Payload | CAN フレーム内のデータフィールド。実際の生データ(シグナル値)を格納する部分で、最大 8 バイト(CAN)または 64 バイト(CAN FD)まで送受信できる。 |
| Ch | Channel(チャンネル)の略称。CANバスの物理的または論理的な通信路を指す。 MicroPeckerX では複数の Ch(例:Ch1-1, Ch1-2)を使い、それぞれ独立してデータの送受信を行うことができる。 |
| GW | Gateway(ゲートウェイ)の略称。異なる通信プロトコルを持つネットワーク間でデータを中継する機能を備えた機器またはソフトウェア。 |
| モニタリング | CANバスから取得したデータをGUIアプリケーション上にリアルタイム表示。 |
| ロギング | CANバスから取得したデータをテキストファイル(.csv )形式でPCの指定フォルダに自動保存。 |
| 物理値 | 実値として使用されるデータ値。「シグナル値 × 分解能 + オフセット」または「(シグナル値 + オフセット) × 分解能」で算出。 |
| シグナル値 | CAN/CAN FD フレームのペイロード内に格納される未変換の生データ値。 |
| ログ再生 | 取得したログファイルを用いて、その内容を再現・再生する機能。 |
| バースト転送 | 単一フレームまたはログを連続送信し、CANバスを高負荷状態にする機能。 |