機能概要と基本操作
機能概要
MicroPeckerX CAN FD Analyzer のモニタリング機能では、接続された CAN/CAN FD バスのフレームデータをリアルタイムで取得・表示できます。
| 機能 | 説明 |
|---|---|
| リアルタイム同時監視 | 接続された最大 8 チャンネルのデータを同時にモニタリング。 |
| ログファイル出力 | フレームデータを CSV 形式のテキストファイルとして、自動で PC の指定フォルダに保存。 |
| 表示モード切替 | ・Single View:1 チャンネルを全画面表示 ・Dual View:2 チャンネルを並べて比較表示 |
| プロトコル自動判別 | CAN と CAN FD を自動検出し、最適なフォーマットで表示。 |
| Each ID 機能 | 各 CAN ID ごとに最新フレームのみを上書き表示し、大量データでも最新状況を一目で把握。 |
| フィルター&ラベル表示 | ・フィルター:表示対象のフレームデータを絞り込み ・ラベル:指定のフレームに任意のラベルを付与 |
| トリガー機能 | 設定した条件を検出すると、自動でログの開始・停止を制御。 |
これにより、複数バスの状況を効率的に監視し、必要なデータを瞬時に把握できます。
また、本章では、モニタリングとロギングを以下の定義で使用しています。
| 説明 | モニタリング(または、モニタ) | ロギング |
|---|---|---|
| 動作 | リアルタイム表示:CANバスから取得したデータをGUIアプリケーション上にリアルタイムで表示します。 | ファイル保存:CANバスから取得したデータをテキストファイル(.csv )形式でPCの指定フォルダに自動保存します。 |
| データ保存 | 一時メモリ保持:データはアプリケーションのメモリ内にのみ保存され、アプリケーションを終了するとすべて消去されます。 | 永続保管:保存されたログはアプリケーション終了後もファイルに残るため、後から解析や共有が可能です。 |
基本操作
1. 通信モニタリングを開始
メニューバーの「Command」→「Start」選択でロギングを開始します。
※スタート時、GUIレイアウトがMonitoring Layoutへ自動で切り替わります。
ツールバーの ボタン、F5キーでもモニタリングを開始できます。
ボタン、F5キーでもモニタリングを開始できます。
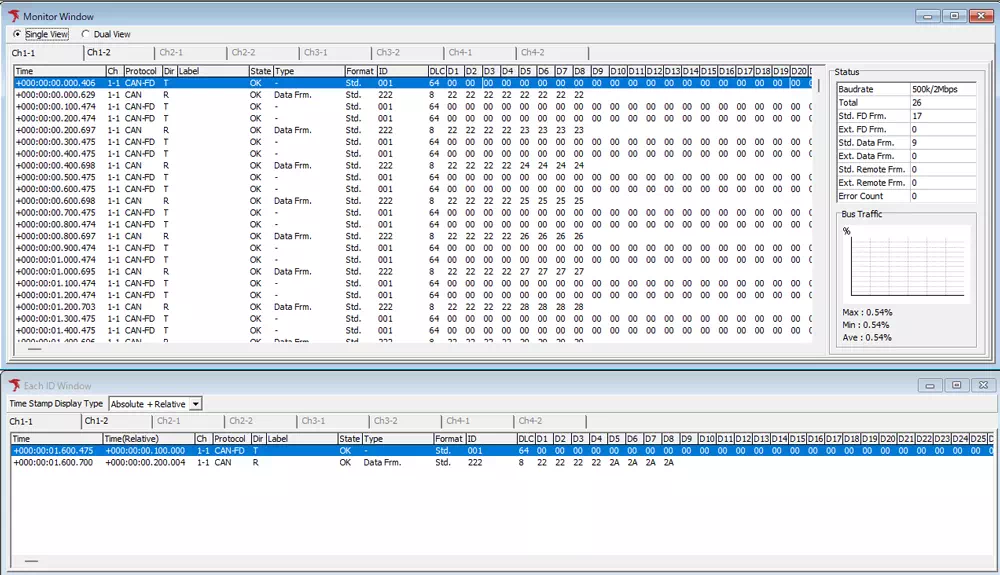
2. モニタリングデータを表示
モニタリン��グ中のログを「Monitor Window」、「Each ID Window」で確認することができます。
3. 通信モニタリングを停止
モニタリングを停止するときはメニューバーの「Command」→「Stop」を選択してください。
ツールバーの ボタン、F6キー、Escキーでもモニタリングを停止できます。
ボタン、F6キー、Escキーでもモニタリングを停止できます。
※停止時、Option設定によっては、Analyze Layoutへ自動で切り替わります。
ログ保存
ツールバーの「Log」設定から、モニタリング中のデータを PC に自動で保存できます。

| 画面メニュー | 説明 | 詳細説明 |
|---|---|---|
| Save Log File | ログの自動保存を有効/無効に切り替え | チェックボックスをONにすると、モニタリング開始と同時にログが保存されます。 |
| Log Folder | ログファイルを保存するフォルダを指定 | 指定したフォルダ内に、設定したファイル名+連番でログファイルが作成されます。 |
| Log File Name | 出力するログファイルの名前を指定 | - |
| No. | 保存するたびにファイル名の末尾に自動で付与される連番 | 連番(No.)は同じ名前で複数回保存した際�にファイルが上書きされないよう、自動でインクリメントされます。 |