ID Filtering
Using MicroPeckerX InstaGW, you can filter specific CAN IDs and forward only those frames to the CAN bus.
Usage Example
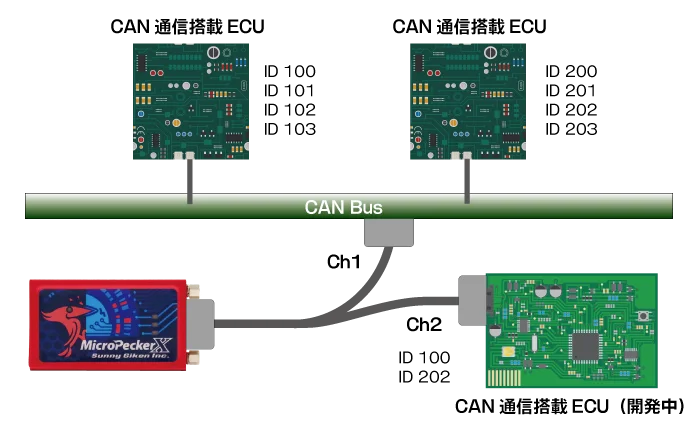
Assume you want to forward only specific CAN IDs (100, 202) to an ECU under development. The GW setting file example is shown below.
Common Settings
Com Sheet
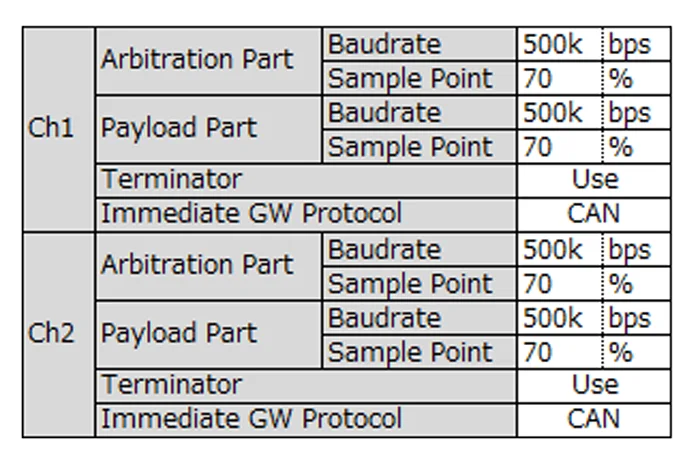
- Configure the baud rates for
Arbitration PartandPayload Partfor each channel. In this example, both Ch1 and Ch2 use CAN. - When using Immediate GW,
Immediate GW Protocoldefines the protocol for each channel. In this example, both Ch1 and Ch2 are set to CAN.
When Using Immediate GW
Immediate GW provides low-latency gateway operation[*].
Immediate GW Sheet
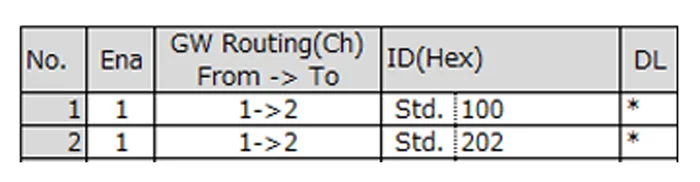
- Set target CAN IDs for protocol gateway on each channel. In this example, target CAN IDs
100and202are configured for1->2 (Ch1->Ch2).
[*]: Gateway latency is approximately 3.5 us (measured with CAN FD communication: arbitration phase 500 kbps, data phase 2 Mbps).
When Using Standard GW
Standard GW[*] supports ID replacement and transmission timing control.
Gateway Sheet

- Configure target CAN IDs for gateway on each channel. In this example,
1->2 (Ch1->Ch2)is configured as CAN-to-CAN. - Target CAN IDs
100and202are forwarded to Ch2 as-is. - A 10 ms delay is added when forwarding to Ch2.
[*]: Gateway latency is approximately 12.5 to 20 us (depends on data length), measured with CAN FD communication (arbitration phase 500 kbps, data phase 2 Mbps).